
Lawrence Berkeley National Laboratory, California, USA (November 2019 to Present)
Research Affiliate, Sustainable Energy Systems Group
- Multifidelity Bayesian optimization of a large-scale multi-agent transportation framework.
Kindi Center for Computing Research, Doha, Qatar University (October 2019)
IAESTE, Cybersecurity Intern
IBM Research, Stuttgart, Germany (April 2019 to September 2019)
Machine Learning Intern
CAROLOGISTICS, Aachen, Germany ( November 2018 to March 2019)
Developer , FAWKES Robot Software Framework
- Markerless machine recognition and production using Artificial Neural Networks: Dataset and labels generation; feature extraction and customized classifier layer training on ImageNet using TensorFlow.
- C++, LUA
Dassault Systemes, Aachen, Germany (July 2018 to Present)
Intern - Developer , SIMULIA Center of Excellence
- Develop an Abaqus python plugin to calculate the desired plastic strain for isotropic hardening of a fuel pipe using UVARM and UAMP subroutines.
- Develop an Abaqus Python script for preprocessing and calculating stress developed for an interference fit between cam bearings and a shaft.
- Parallel execution with MPI using VUEXTERNALDB and VDISP subroutines.
APS GmbH, Aachen, Germany (April 2018 to Present)
Research Associate
- Development of Robot Vision Software using OpenCV as a Plug-In to extend ARC Lab’s industrial learning platform.
- Collision control using ROS, MoveIt! (FCL) and Gazebo.
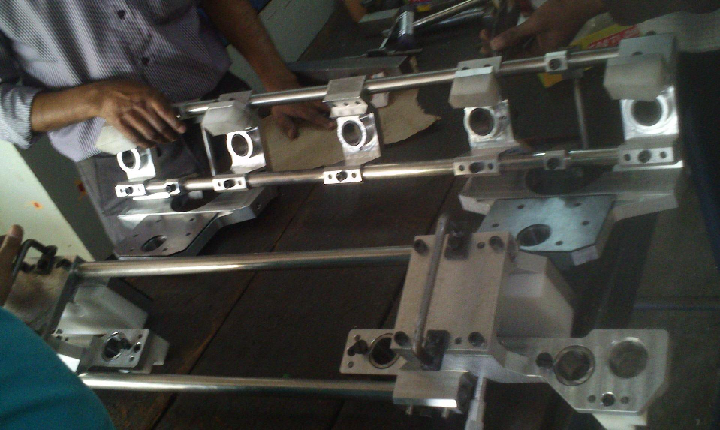
- Assembly of Train Windows in a Train Wall using a Laser Based Sensor.
- Sensing Strategy and Path Creation for Laser Sensor based Welding and Palletizing for the ABB IRB 7600 and KUKA LBR IV.
- Robots: ABB, KUKA, Motoman, IGUS.
- Video: Train window assembly using ABB project

- Video: Welding simulation using ABB RobotStudio

- Video: ABB IRB 7600_340 Palletizing

- Video: Kuka LBR 4 working on Memminger Knitting Machine

Dassault Systemes, Pune, India (December 2015 to August 2017)
Simulations Developer (CAE, Robotics) , Industry Solutions Group
- Developing Industrial Solutions in ABAQUS, Dymola, and CATIA on:
- Analysis Portfolio: Nonlinear Structural Analysis
- Geometric Modeling: ICEM Surf, Subdivision and Freestyle Surfacing
- Scripting: ABAQUS Scripting, VBA Automation
- 3DEXPERIENCE Digital Twin using Model-Based System Engineering:

- Poppy Humanoid Robot
- Glass Cleaning Robot
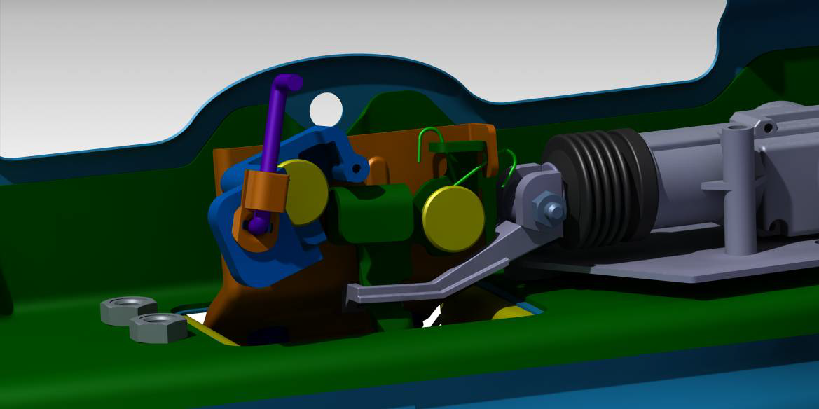
- Automatic Wiper System using an IR Sensor
Designed a logical architecture for a Wiper rig setup, from where the IR sensor’s run time values were mapped and communicated to CATIA using an FMI. It simulated the physical and virtual twin of the Windscreen Wiper system, whenever the sensor detected water on the shield.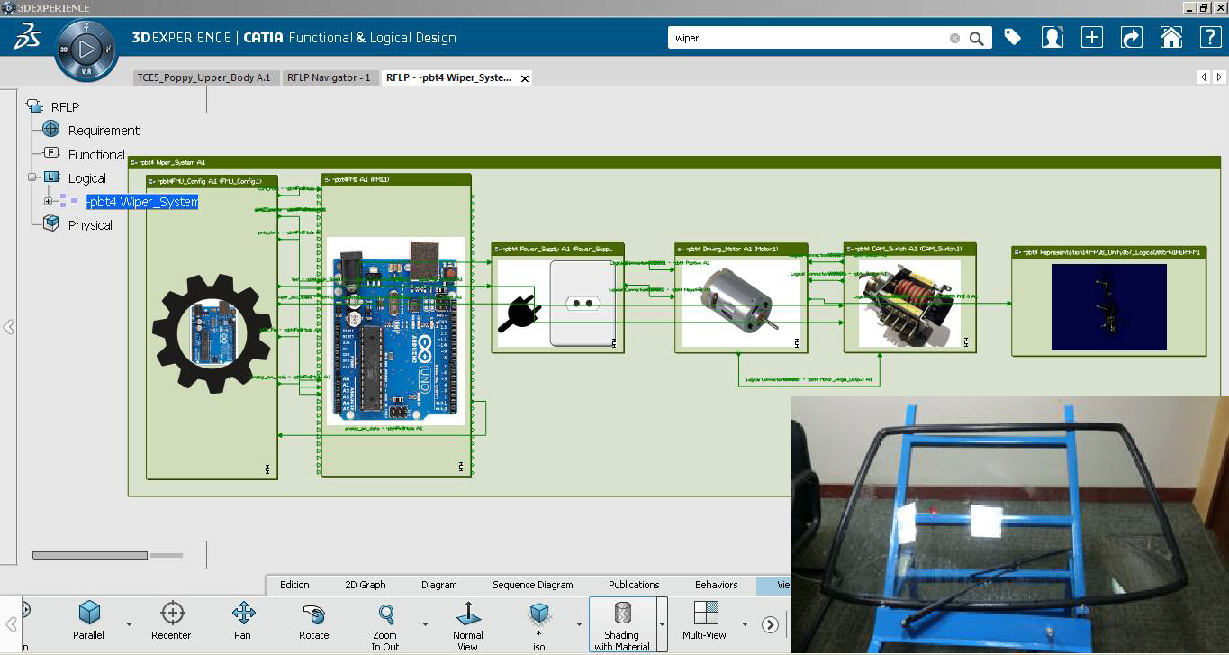
- 6-DOF Robotic Arm
Controlled the motion of a Robotic Arm with six servo-motors using Arduino - Pulse Width Modulation and Functional Mock-up Interface in CATIA Systems.
- Automotive Simulator System
- Network-Based (IoT) Devices: Automated Lights using the ESP8266 MCU
Autocop, Bengaluru, India (July 2014 to November 2015)
Mechanical Design Engineer , OEM Division
- Development of TATA Nano Remote Controlled Boot Release accessory.
Prototype made of Delrin material:

- Snap Fit casing of Automotive Leg-room Lights

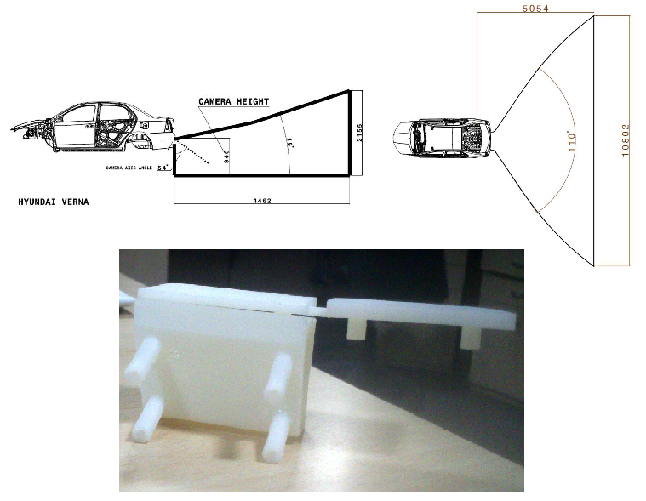
- Rear-View Camera Development using Fused Deposition Modeling prototype: Benchmarking CAD models (IP67 casing).
Geometrical Mapping for Horizon Level and Camera Axis Angle in IRVM.
- FORD - Vehicle Modification Center
Designed the Delrin parts of the spoiler jig for Ford EcoSport:
The mounted spoiler jig on the boot door of Ford EcoSport:

Alfa LAVAL, Dapodi, India (June 2013 to July 2013)
Intern , Process Equipment Manufacturing
- Reboiler Design: Calculation of heat transfer coefficient and tube pattern.
TATA Steel, Ranjangaon, India (May 2012 to July 2012)
Intern
- Hot-Rolled Steel workplace optimization and Godrej FG pallet standardization.